12. Receding Horizon Exercise
Receding Horizon Planning
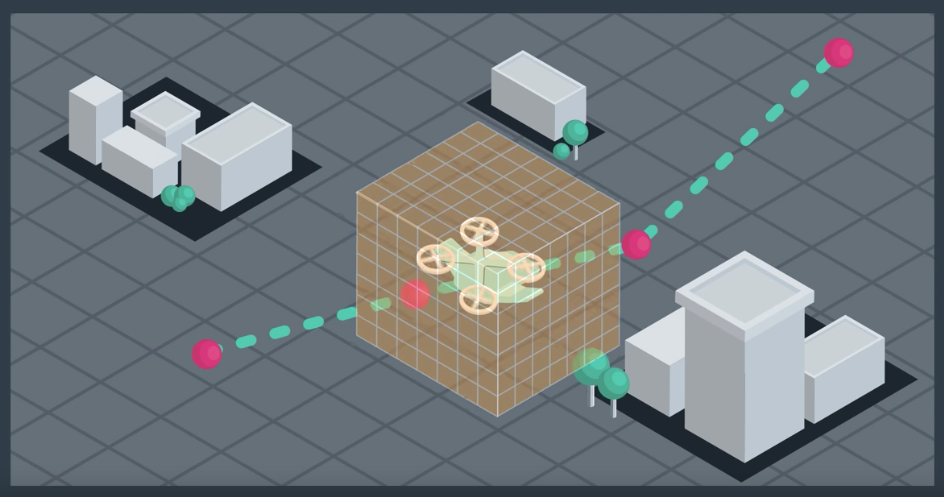
Receding horizon planning is a two-tiered approach to solving the planning problem. First, you find a coarse global plan all the way from the start to the goal. Then, as you execute that plan, you continuously replan in a local volume around the vehicle at a higher resolution. This approach allows for fine tuning your plan on the fly, reacting to obstacles that weren't on the map or other uncertainties, like sensor errors or wind. The edge or horizon of your local planner continuously moves out in front of you and hence the name, receding horizon planning.
Receding Horizon Exercise
Given the dynamic nature of receding horizon planning, it's much more interesting to implement this technique in a simulator, where you can actually execute a plan, than in an exercise. And in the project at the end of these lessons, you'll get a chance to do just that!
In the notebook below, there is no simulator, but you can get a feel for receding horizon planning by combining the methods you've worked with up to this point to create a two-tiered solution to your planning problem.
First, you'll use the method of your choice to find a coarse global plan from start to goal. Next, you'll generate a plan through your local volume, at a higher resolution, that's not planning toward the goal, but rather, to the next waypoint in the global plan.
This exercise is relatively open-ended and, while it won't be required to implement receding horizon planning in the project, we encourage you to investigate the techniques you might use here and consider adding these to your project solution!
Workspace
This section contains either a workspace (it can be a Jupyter Notebook workspace or an online code editor work space, etc.) and it cannot be automatically downloaded to be generated here. Please access the classroom with your account and manually download the workspace to your local machine. Note that for some courses, Udacity upload the workspace files onto https://github.com/udacity, so you may be able to download them there.
Workspace Information:
- Default file path:
- Workspace type: jupyter
- Opened files (when workspace is loaded): n/a